
Rear Admiral Wayne E. Meyer, the U.S. Navy leader widely known as the “Father of Aegis,” would have turned 100 last month. He led the development of the Aegis Combat System, one of the most important naval defense systems ever built. To this day, Aegis remains critical to ballistic missile defense, air defense, and fleet protection. In many ways, it was the original “Golden Dome.”
Meyer grew up during the Great Depression, an era that rewarded resourcefulness, discipline, and resilience. He carried that mindset into his Navy career, and it shaped the way Aegis was built. At the center of that approach was a motto that still resonates, and one that captures how we build at Blue Water Autonomy:
Build a little. Test a little. Learn a lot.
For Blue Water, that means:
Build: We build the core hardware and software primitives for autonomous ships.
Test: We test on the water seven days a week.
Learn: We are never perfect, and every lesson gets rolled directly into the next build, test, and learn cycle.
The ocean is an unforgiving environment. Sea state, saltwater, weather, corrosion, vibration, and New England conditions (in both winter and summer) expose weaknesses quickly. That is exactly why we test here.
Traditional shipbuilding programs often require years of planning, design, and development before integrated systems are tested in realistic operating conditions. In many cases, critical systems are not fully exercised until the vessel is launched and on the water.
At Blue Water, even building a prototype for a 770-ton autonomous warship is a many-month effort. We did not want to wait until launch to test our core technology.
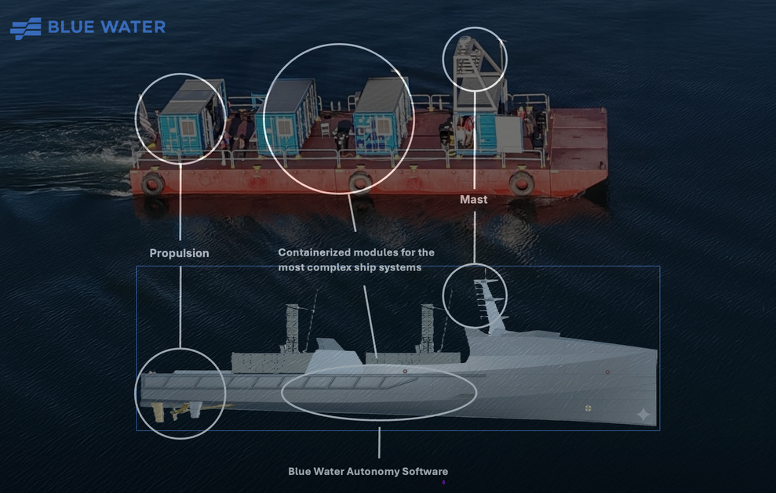
Our answer was the Autonomous Test Vessel aka Ironsides: a 100-foot, 170-ton platform capable of testing everything from rotating radars to spinning propellers.
We were not trying to reinvent hull design. We had already partnered with Damen on a proven Axe Bow design that has been tested across many manned vessels and at least one unmanned vessel. The problem we were solving was different: the technology stack required to power and operate a 100 percent unmanned, medium-sized vessel with no bridge team and no engineering crew onboard.
First, we focused on engineering autonomy: an engine room capable of operating for months at a time without people onboard. By isolating the engine room as a discrete system, we created clear boundaries and interfaces that allowed us to iterate quickly without being constrained by traditional shipbuilding timelines.
That led us to a containerized architecture.
The rationale was straightforward: modular systems are easier to test, maintain, and scale. More importantly, they enable a fundamentally different sustainment model. Instead of repairing every system in place, modules can be swapped in and out, reducing iteration and maintenance cycles from weeks or months to hours or days.
In effect, we were building a plug-and-play engine room for future Liberty Class ships.
Second, we focused on navigation autonomy: a vessel with no bridge, capable of navigating across the ocean using best-in-class sensors. We built a modular mast so we could mount, evaluate, and reconfigure different sensor arrays while testing true ship autonomy on the water.
Unlike smaller unmanned vessels, our platform carries a much taller mast and substantially more onboard compute to support multiple high-definition video streams. In practice, the vessel looks less like a small autonomous craft and more like a floating sensor and broadcast platform, with racks of GPU compute ingesting and processing data in real time.
That scale changes the integration challenge. By deploying quickly on a test vessel, we did not need to finalize every element of a production-ready installation before getting on the water. Final cable routing, connector selection, network topology, switch placement, power distribution, environmental hardening, thermal management, EMI mitigation, and long-term serviceability could all be refined after the core architecture had been exercised in realistic conditions. The objective was to validate the system, identify integration risks early, and carry those lessons into a more robust production design.
Third, we tested the engine modules and navigation module together on the water as an integrated system. We went beyond standalone engine testing by installing a full propulsion system, allowing the test vessel to operate entirely unmanned and validating how autonomy, propulsion, sensing, and control systems perform together in real-world conditions.
In short, Ironsides has become a critical test platform and the fastest path to validating containerized engine rooms and navigation autonomy in real-world conditions. This approach maximizes efficiency across time, capital, and engineering bandwidth, allowing us to test, learn, and iterate continuously. With thousands of operational hours on the water, we have meaningfully de-risked core software, autonomy, and propulsion systems.
At Blue Water, we believe this kind of capital-efficient, on-water testing should become more common across the maritime industry. Land-based testing has an important role to play, but the ocean reveals what the lab cannot. For unmanned surface vessels (USV), there is no substitute for getting on the water, learning fast, and building better with every cycle.